
866-685-4443 | Get in Touch Online ...
Temperature Controller Styles
There's not a lot of magic to choosing the right temperature controller for a given application, since there are really only two types. Broadly speaking, you have your ON-OFF (a.k.a. ON/OFF, Bang-Bang, Snap-Bang, and so on) controls, and your PID controls. Beyond that, it's a question of whether you have an electronic control or an electro-mechanical control. Once you choose from the possible combinations, you still have a lot of options. This page is here to help you learn which type is most suited to your specific application.
ON-OFF control
ON-OFF controllers, in their simplest form, are thermostats. They are used in situations when accuracy is not a major priority (± 10°F, ± 6°C), and when the work load temperature changes slowly over time. The temperature is set by a dial or screw, which determines when the heater will be turned on or off.
For example, in a bimetallic thermostat, two different metals are bonded together and will expand at different rates when they are heated. When the metals expand, the electrical contacts will diverge and the electric current to the heater will no longer flow. When the temperature cools down, the bimetallic strip will bend back, the contacts will close, and current will flow to the heater once again.
ON-OFF Control can also be achieved using an electronic temperature controller. Instead of using a mechanical sensor, an electric temperature sensor is used instead. This sensor, for example a thermocouple, sends a voltage signal which is interpreted by the controller as a temperature. A set-point is entered into the controller, and when the sensor reaches that temperature, a relay connected to the controller disconnects the heater's power supply. When the temperature drops below the set-point, the relay will switch ON the heater to maintain the temperature. A trend report of an ON-OFF electronic temperature controller is shown in Figure 1 below.
.jpg)
Figure 1
The difference between the set-point and the switch-ON temperature is called the switching hysteresis. Because these controllers usually use an electromechanical relay to switch the power ON and OFF to the heater, the switching hysteresis prevents the relay from firing too quickly, often called "chatter". When this occurs, the relay can get worn out very quickly, and would need to be replaced often.
So why choose ON-OFF control? If your application requires an inexpensive yet effective method of temperature control, and the material that is being heated does not require pinpoint accuracy, you would want to use an ON-OFF controller.
PID Control is a widely used temperature control method in industrial applications. PID stands for Proportional–Integral–Derivative, which describes the mathematical calculations that are applied to calculate the error between the current temperature and the desired set-point. As a result, the PID control algorithm can be used to eliminate temperature swings that occur when using an ON-OFF controller. To better understand how a PID controller works, it's better to separately describe each part of the calculation.
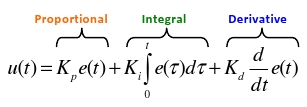
The equation for the PID control algorithm is shown above, where each of the three parts of the equation are given a constant, K. However, most PID controllers have the integral and derivative constants represented as shown below:
.jpg)
The Ti and Td variables are referred to as the time value. Ti is defined as the time required by the integral term to generate an output equivalent to the proportional term. Td is defined as the time required by the proportional term to repeat the output provided by the derivative term. With these substitutions, our equation now becomes:
.jpg)
In this equation, you can see that the proportional term, Kp, has an amplifying effect on the entire algorithm. We will now go through some examples of each part of the algorithm to see exactly how each portion changes the way the system works.
Proportional control
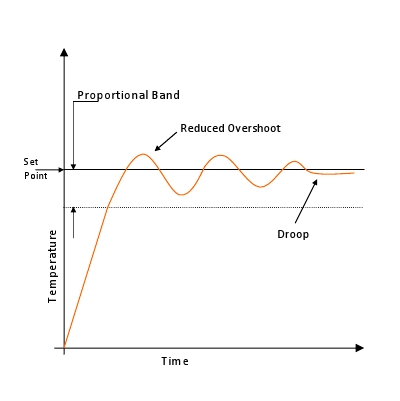
The role of proportional control is to stabilize the work load temperature. A proportional constant will be entered into the controller by the user, and that value will determine how large the "proportional band" is. When the process temperature is inside the proportional band, the controller output will vary the amount of power given to the heater to reduce overshoot of the set point. Illustrated below, a strictly proportional controller will also experience "droop". Because the heater is given 0% power when the process and set point temperatures are equal, the process will generally stabilize somewhere below the set point. The amount of droop increases with larger proportional bands.
Integral control
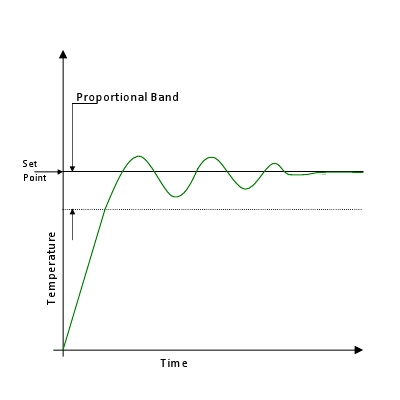
The role of integral control is to eliminate the "droop" seen in proportional control. Integral is also called "reset", and automatically pushes the process value toward the desired set point once droop occurs. Even when the set point is changed, the integral control will work to eliminate droop. An illustration of both proportional and integral control is shown below.
Derivative control
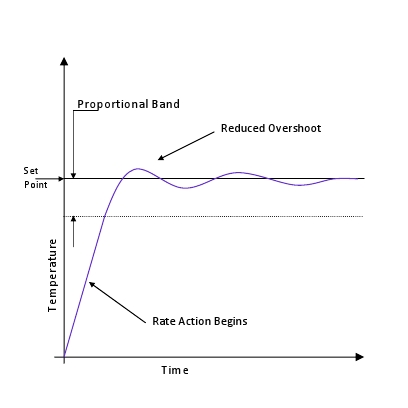
The role of derivative control is to reduce or eliminate overshoot and undershoot. Derivative control, also called "rate", measures the rate of temperature change in the process value. If the temperature rises too fast, it will switch the heater off to prevent overshoot. If the temperature is falling too quick, more power will be provided to the heater to reduce undershoot. Derivative action anticipates overshoot and undershoot and makes adjustments to the power given to the heater to prevent them. The result of derivative action added to proportional and integral control is illustrated below.
Autotune
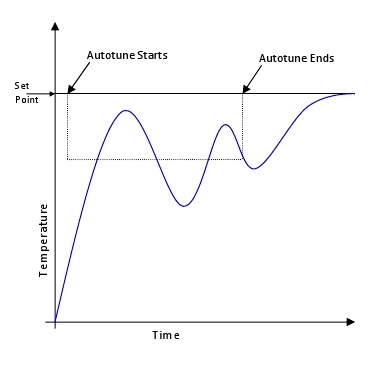
Many PID controllers have the option to "autotune", which eliminates the lengthy process of manually setting up the controller. Manually tuning can take anywhere from hours to days to optimize, and autotune eliminates the need for monitoring and adjusting the behavior of the controller. When autotune is switched on, the controller begins working as an ON-OFF output to the heater. It places an autotune set-point below the actual set-point to make its calculations and to avoid overshooting during the process. As the process value raises, the controller monitors the behavior of the process value to calculate the appropriate variable values. The controller allows the user to make adjustments to the variables after autotuning if the desired control was not achieved with the original values.
Which product is best for my application?
ON-OFF is best suited for use when precise control is not necessary. It works best under conditions where the mass of the process is large, and temperature changes occur over long periods of time. ON-OFF controllers can also be used as a high limit shut-off, where power will be shut off to the system if an unwanted temperature is reached. We currently have indicating (with a digital display) and non-indicating (knob adjustable or static set-point) ON-OFF controllers for sale in our online store!
PID control is recommended for processes that have changes in load. For example, if an object is dropped into a heated solution, the need for heat is greater and a PID controller will adjust to stabilize the system. PID control is best used in systems that have a relatively small mass and react quickly to changes in energy being removed or added to the process. The controller can also quickly adjust to changes in the set-point. Our current selection of PID controllers can be seen in our online store!
If after reading this, you're still not sure which product to use, we'll be glad to help you figure it out.Give us a call at (866) 685-4443, send us an e-mail at info@oemheaters.com, or fill out a contact form.